近日,必威BETWAY官网陈原教授团队在水下机器人路径规划研究领域的最新成果“Cyl-iRRT*: Homotopy Optimal 3D Path Planning for AUVs by Biasing the Sampling into a Cylindrical Informed Subset”在电气电子领域国际顶级权威期刊IEEE Transactions on Industrial Electronics(电气和电子工程师协会工业电子会刊)上发表。 该研究提出了一种通过启发式圆柱子集来寻求同伦最优路径的方法。
相关研究得到国家自然科学基金面上项目与山东省自然科学基金资金支持。论文第一作者为学院博士研究生于福杰,通讯作者为陈原教授,betway88必威东盟体育(威海)为论文独立完成单位。
对于水下机器人而言,在有障碍物存在和其它限制条件下寻找一条安全、高效的路径至关重要。然而,常规的快速随机扩展树方法只能用于二维空间内的路径规划,而且还存在最优性不可靠、重复搜索无效区域、计算效率与最短路径不可调和等问题。

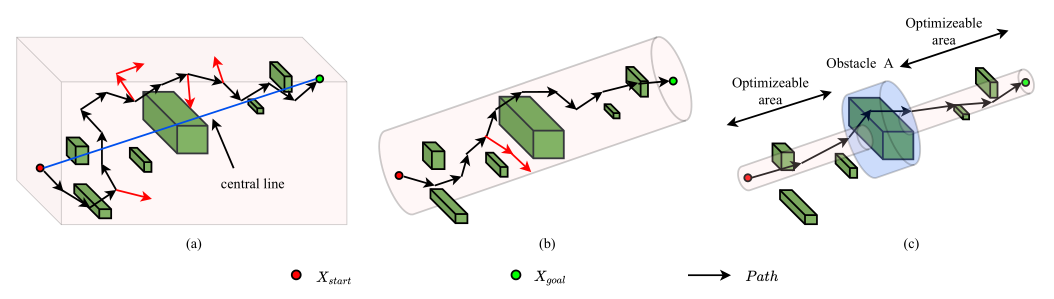
陈原教授团队依靠在水下机器人领域多年来积累的研究经验,针对复杂环境下水下机器人路径规划存在的问题,提出了一种通过启发式圆柱子集来寻求同伦最优路径的方法,巧妙地借助一个线性迭代收缩的动态分段圆柱体约束模型,提高了算法收敛到最优速度和返回路径质量,大幅降低了水下机器人的能源消耗。
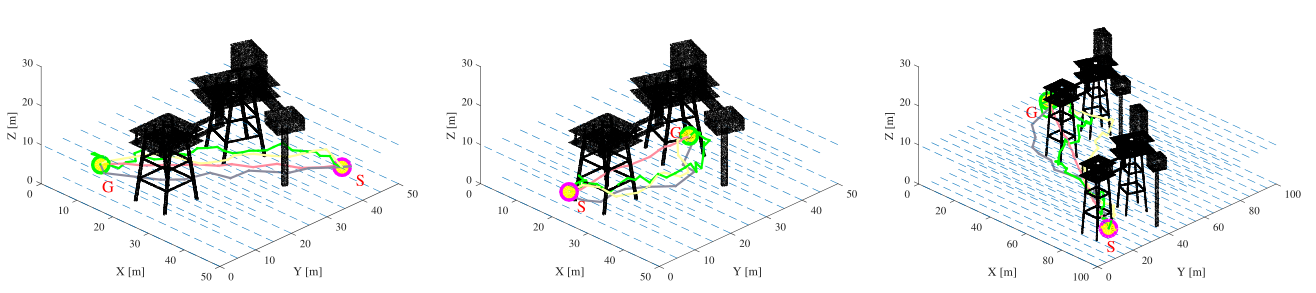
IEEE Transactions on Industrial Electronics主编Makoto Iwasaki教授及匿名审稿人对该工作给予较高评价(This is a good job! A well written manuscript will benefit the readers of the esteemed journal.),认为将采样集中在由圆柱体描述的启发式子集中来寻求同伦最优路径的方法是水下机器人在复杂水下环境中快速找到高质量路径的有效方式之一,论文进行了广泛的模拟以证明所提出方法的有效性。(The authors conducted extensive simulations to demonstrate the effectiveness of the proposed approach.)
IEEE Transactions on Industrial Electronics是电气电子领域的国际顶级权威期刊。该杂志创办于1982年,目前由IEEE工业电子学会(IEEE Industrial Electronics Society)主办,2021年影响因子为8.236,属于中科院期刊分区SCI一区TOP期刊,主要报道信息、控制、电气及工业电子等领域最新的研究进展。
作者:文/刘秀萌 图/刘秀萌 责任编辑:牛淼淼


